Kegelschnitte
| Website: | WueCampus |
| Kurs: | vhb - Analytische Geometrie - (DemoKurs) |
| Buch: | Kegelschnitte |
| Gedruckt von: | Visiteur anonyme |
| Datum: | Freitag, 3. Juli 2026, 08:06 |
1. Quadratische Formen
| Viele bekannte geometrische Objekte lassen sich algebraisch als Lösungsmenge von geeigneten Gleichungen beschreiben. Kreise, Ellipsen, Parabeln oder Hyperbeln können z. B. durch passende quadratische Gleichungen charakterisiert werden. Dies motiviert uns sogenannte quadratische Formen zu definieren. |
1.1 Kreise und Ellipsen
Wir definieren Kreise und Ellipsen im  und zeigen, dass sich diese durch geeignete quadratische Gleichungen beschreiben lassen. und zeigen, dass sich diese durch geeignete quadratische Gleichungen beschreiben lassen. |
1.2 Hyperbeln und Parabeln
| Wir definieren Hyperbeln und Parabeln im und zeigen, dass sich diese ebenfalls durch geeignete quadratische Gleichungen beschreiben lassen. |
2. Orthogonale Abbildungen
| Wir interessieren uns im Folgenden für Abbildungen, welche die Lage eines geometrischen Objektes in der Ebene oder im Raum verändern, das Objekt an sich jedoch unverändert lassen. Beispiele für solche Abbildungen sind etwa Translationen, Drehungen und Spiegelungen. |
2.1 Drehungen in Ebene und Raum
In diesem Kapitel fokussieren wir uns auf Drehungen, Spiegelungen und Drehspiegelungen von geometrischen Objekten. Für deren Beschreibung benötigen wir sogenannte orthogonale Abbildungen (bzw. orthogonale Matrizen). Kurz gesagt bilden orthogonale Abbildungen  orthogonal zu einander stehende Vektoren wieder auf orthogonale Vektoren ab. orthogonal zu einander stehende Vektoren wieder auf orthogonale Vektoren ab. |
2.2 Euklidische Bewegungen
Wir wollen zwei geometrische Objekte als nicht wesentlich verschieden ansehen, wenn sie sich zwar durch ihre Lage im Raum, nicht aber in Form und Größe unterscheiden, bzw. mathematisch präziser: wenn sie sich durch sogenannte euklidische Bewegungen ineinander überführen lassen. Euklidische Bewegungen sind hierbei abstandserhaltende Abbildungen  . Sie bestehen aus einer orthogonalen Abbildung verkettet mit Translationen und sind somit linear und winkeltreu. . Sie bestehen aus einer orthogonalen Abbildung verkettet mit Translationen und sind somit linear und winkeltreu. |
3. Ähnlichkeitsabbildungen
| Nach den euklidischen Bewegungen (Kongruenzabbildungen) studieren wir nun eine weitere Klasse von geometrisch interessanten Abbildungen, nämlich Ähnlichkeitsabbildungen. Ähnlichkeitsabbildungen sind winkel- und verhältnistreu. Sie besitzen wichtige Anwendungen in der Dreiecksgeometrie. |
4. Hauptachsentransformation
| Der Satz über die Hauptachsentransformation besagt, dass jede symmetrische Matrix mittels einer geeigneten orthogonalen Matrix diagonalisiert werden kann. Damit können wir jede quadratische Form durch einen geeigneten Koordinatenwechsel (basierend auf einer passenden orthogonalen Abbildung) in metrische Normalform bringen. |
5. Allgemeine Kurven zweiter Ordnung
Eine wichtige Anwendung der Hauptachsentransformation liegt in der Diskussion von Kurven im  , die durch quadratische Gleichungen definiert werden. Wir beschreiben ein Verfahren, mit dem wir zu einer gegebenen quadratischen Gleichung mittels Hauptachsentransformation und quadratischer Ergänzung die zugehörige metrische Normalform bestimmen können. An der metrischen Normalform lässt sich leicht ablesen, um welches geometrisches Objekt es sich bei einer gegebene Quadrik handelt. , die durch quadratische Gleichungen definiert werden. Wir beschreiben ein Verfahren, mit dem wir zu einer gegebenen quadratischen Gleichung mittels Hauptachsentransformation und quadratischer Ergänzung die zugehörige metrische Normalform bestimmen können. An der metrischen Normalform lässt sich leicht ablesen, um welches geometrisches Objekt es sich bei einer gegebene Quadrik handelt. |
6. Klassifikation der Quadriken
Über die metrische Normalform lassen sich die verschiedenen Typen von Quadriken im klassifizieren. Wir diskutieren dabei ausführlich den Fall der Ebene und des dreidimensionalen Raums  . . |
7. Kegelschnitte
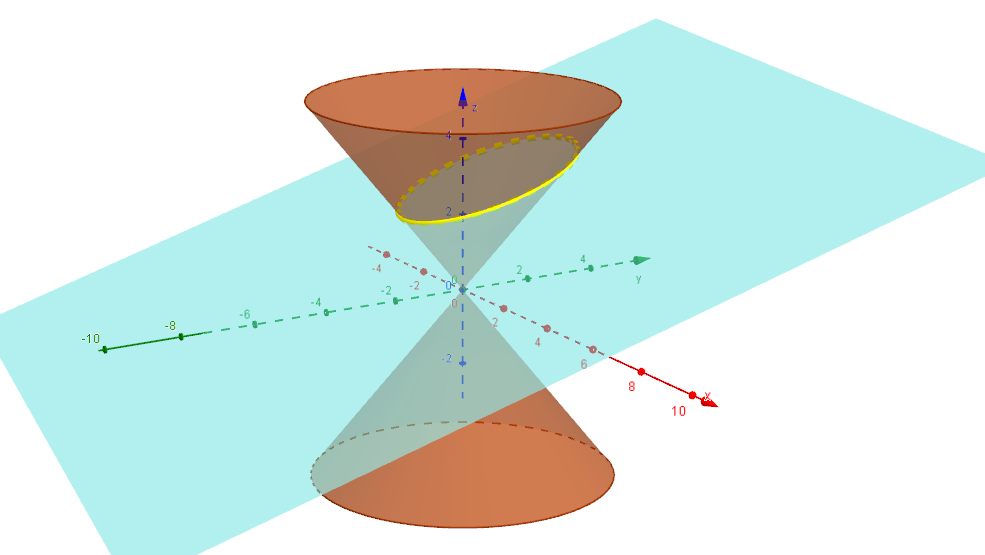
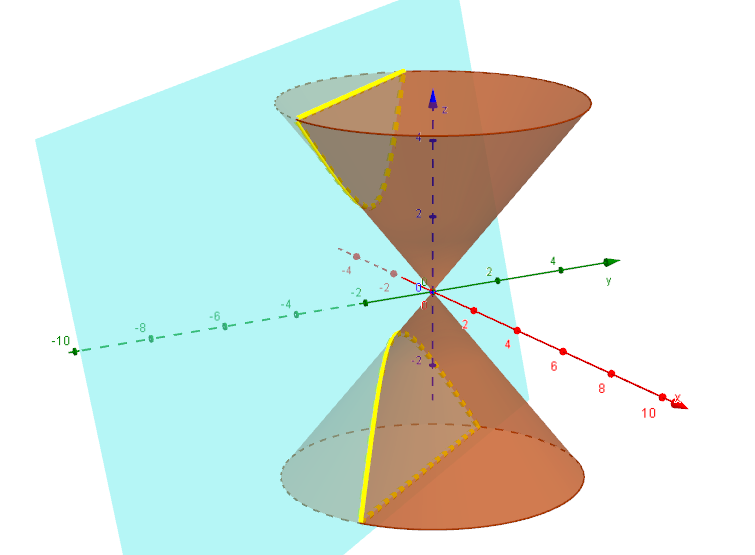
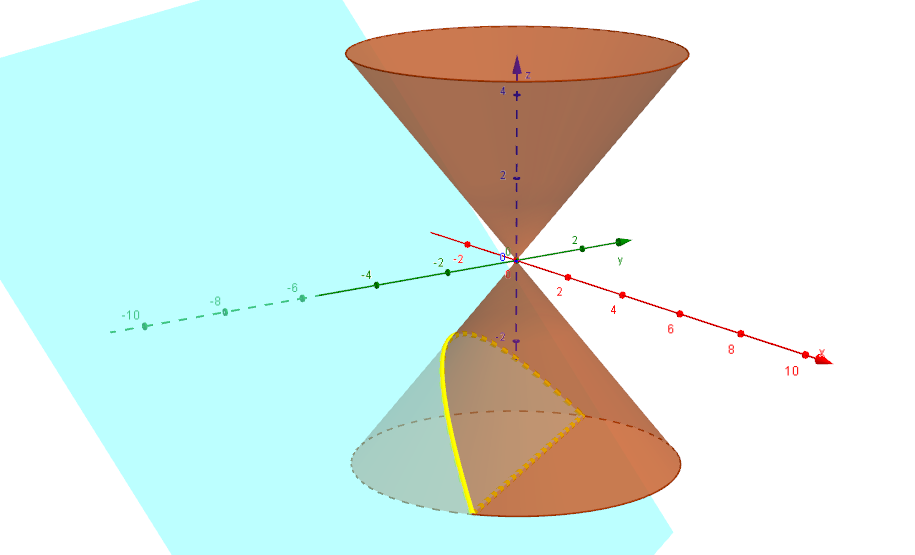
| Nachdem wir die verschiedenen Typen von Quadriken klassifiziert haben, wollen wir jetzt den Zusammenhang zwischen diesen geometrischen Objekten in der Ebene und im dreidimensionalen Raum beleuchten. Wir sehen, dass sich die Quadriken der Ebene als Schnitte von Ebenen mit einem Kreiskegel im dreidimensionalen Raum ergeben |
|
Ein Kreiskegel im euklidischen Raum
Schneiden wir hingegen mit einer Ebene
Folgender zentraler Satz besagt, dass wir sämtliche Quadriken der Ebene (bis auf Ähnlichkeit) als Schnitte von Ebenen mit einem Kreiskegel im dreidimensionalen Raum realisieren können. Aus diesem Grund nennt man die Quadriken der Ebene auch Kegelschnitte. |










| Satz 7.1 Die Schnittkurve  einer Quadrik einer Quadrik  mit einer Ebene mit einer Ebene  ist kongruent zu einer Quadrik ist kongruent zu einer Quadrik  (also einem Kegelschnitt). Ist (also einem Kegelschnitt). Ist  ein Kreiskegel, so existiert zu jedem Kegelschnitt ein Kreiskegel, so existiert zu jedem Kegelschnitt  eine Ebene , so dass ähnlich zu der Schnittkurve ist. eine Ebene , so dass ähnlich zu der Schnittkurve ist. |
|
Ellipsen treten beispielsweise auch als Schnittkurven einer Ebene mit Ellipsoiden, elliptischen Paraboloiden, ein- oder auch zweischaligen Hyperboloiden oder elliptischen Zylindern auf, jedoch nicht als Schnitt einer Ebene mit etwa einem hyperbolischen Zylinder. Die einzige Quadrik im |
| Satz 7.2 Fünfpunktesatz Durch fünf Punkte einer Ebene, von denen keine vier kollinear sind, gibt es immer einen Kegelschnitt. Ferner existiert zu gegebenen paarweise verschiedenen fünf Punkten einer Ebene, von denen keine drei auf einer Geraden liegen, ein eindeutiger Kegelschnitt durch diese fünf Punkte. |
| Dieser Idee liegt auch das Global Positioning System (GPS) zugrunde, welches die Navigation (etwa mit Autos) erleichtert. |